
Opis ogólny e-laboratorium
W projekcie jako rezultat intelektualny O1 został opracowany zespół ćwiczeń laboratoryjnych w zakresie napędu elektrycznego. Laboratorium zdalne ACS-850 bazuje na istniejącej infrastrukturze laboratorium stacjonarnego wykorzystywanego do zajęć laboratoryjnych w ramach kursu „ATV0080 Przetworniki zasilające i sterowanie napędami” w Tallinn University of Technology (TalTech, Estonia). Struktura ćwiczeń oparta jest na walizce demonstracyjnej ABB ACS850-04 i polega na testowaniu i regulacji przetwornicy częstotliwości ACS850 w celu zapewnienia prawidłowego funkcjonowania układu oraz zrozumienia zasady jego działania. Celem pracy jest nauczenie się:
- Kontrolowania stałej prędkości oraz/lub kierunku obrotu,
- Dostosowywania trybu przyspieszania i zwalniania,
- Wykorzystania wejść cyfrowych i analogowych,
- Wdrożenia kompensacji podczerwieni i innych funkcji przemysłowych przetwornic częstotliwości.
W laboratorium zdalnym wykorzystywany jest rzeczywisty sprzęt przemysłowy, dzięki czemu nauka studentów jest zbliżona do urządzeń wykorzystywanych w typowej praktyce inżynierskiej. Laboratorium jest zintegrowane z platformą Moodle, dzięki czemu można uzyskać dostęp do wszystkich materiałów związanych z laboratorium, szablonów raportów i podręczników. Za pośrednictwem łączy internetowych studenci mogą połączyć się z laboratoryjną bazą sprzętową, kontrolować ją i obserwować informacje zarówno za pomocą interfejsu użytkownika (UI), jak i strumienia video z kamery.
Opis narzędzi sprzętowych i oprogramowania
Napęd będący wyposażeniem walizki demonstracyjnej ACS850-04 został zmodyfikowany w celu dostosowania do zasilania jednofazowego. Napęd demonstracyjny w walizce ma oprogramowanie sprzętowe dostosowane do zasilania jednofazowego 230 VAC. Walizka jest wyposażona w silnik asynchroniczny ABB M2VA 56 B 4 [1]. Przy wsparciu oprogramowania sprzętowego możliwe jest utrzymanie funkcji sterujących oraz sterowanie prędkością i momentem obrotowym. Ustawienia parametrów są niezbędne do konfiguracji i programowania funkcji oprogramowania sprzętowego. Ustawienia parametrów można programować za pomocą panelu sterowania, narzędzia komputerowego DriveStudio lub interfejsu Fieldbus. W napędzie programuje się parametry umożliwiające zmianę określonych ustawień napędu. Przetwornica częstotliwości ABB ACS-850 posiada aż 99 grup parametrów. ABB ACS-850 można podłączyć do zewnętrznego systemu sterowania poprzez wbudowany interfejs Fieldbus, obsługujący protokół Modbus RTU. Zarówno wysyłanie, jak i odbieranie danych cyklicznych jest możliwe dzięki temu protokołowi z poziomem czasu 10 ms. Zaciski przyłączeniowe XD2D na jednostce sterującej JCU mogą być wykorzystywane do komunikacji z urządzeniem poprzez interfejs Embedded Fieldbus (RS-485) [2].
Obecność interfejsu komunikacyjnego RS-485 oraz protokołu Modbus TRU były głównymi powodami wyboru modułu Raspberry Strato Pi CAN. Strato Pi CAN to serwer oparty na Raspberry Pi 4 do zastosowań przemysłowych i motoryzacyjnych. Moduł wyposażony jest w interfejsy CAN V2.0B oraz RS485 umożliwiające komunikację z urządzeniami przemysłowymi. Ponadto Strato Pi wyposażony jest w sprzętowy watchdog, zegar czasu rzeczywistego (RTC) z wymienną baterią zapasową, wstępnie zmontowany układ chłodzenia oraz przekaźnik z przełącznikiem (CO) [3].
Interfejs użytkownika do sterowania konfiguracją sprzętu to witryna internetowa utworzona przy użyciu języków CSS, HTML i JavaScript. Interfejs WWW posiada taką samą funkcjonalność jak panel sterowania konwertera ACS-850, ale jest dostosowany do strony internetowej. Niektóre moduły interfejsu są implementowane przy użyciu bezpłatnego frameworku CSS o otwartym kodzie źródłowym Bootstrap.
Table 1. Opis zasobów sprzętowych
| Nr | Urządzenie | Zadania |
| 1 | ACS850-04 walizka demonstracyjna | System napędowy będący przedmiotem badania |
| 2 | Strato Pi CAN serwer | Serwer oparty na sieciowym interfejsie użytkownika, sterowanie systemu i komunikacja z systemem laboratoryjnym |
| 3 | Raspberry Pi 4 | Serwer interfejsu użytkownika opartego na stronie internetowej, strumieniowanie wideo |
| 4 | Logitech C615 web camera | Źródło sygnału wideo |
Zasada działania
Płyta Strato Pi CAN w sposób ciągły odczytuje wartości z rejestrów holdingowych ACS-850 za pomocą interfejsu RS-485 i protokołu komunikacyjnego Modbus. Kod back-endu napisany jest w Pythonie przy użyciu Modbus Test Kit i bibliotek OpenCV. To rozwiązanie pozwala użytkownikowi na dostęp tylko do określonych rejestrów zdefiniowanych w kodzie w celu kontrolowania konfiguracji laboratorium. Ma to na celu optymalizację wykorzystania zasobów obliczeniowych, gdyż ciągły odczyt wszystkich rejestrów może być nieefektywny. Rozwiązanie front-end tworzone jest z wykorzystaniem języków CSS, HTML i JavaScript. Niektóre moduły interfejsu użytkownika zostały wykonane przy użyciu bezpłatnego frameworku CSS o otwartym kodzie źródłowym Bootstrap. Wymiana danych pomiędzy front-endem i backendem odbywa się przy użyciu plików JSON.
Interfejs oparty na WWW posiada taką samą funkcjonalność jak panel sterowania konwertera ACS-850, ale jest dostosowany do wymagań strony internetowej i e-laba. Użytkownik może uzyskać w czasie rzeczywistym stan konfiguracji laboratorium i kontrolować go, obserwując zmieniające się wartości za pośrednictwem interfejsu użytkownika.
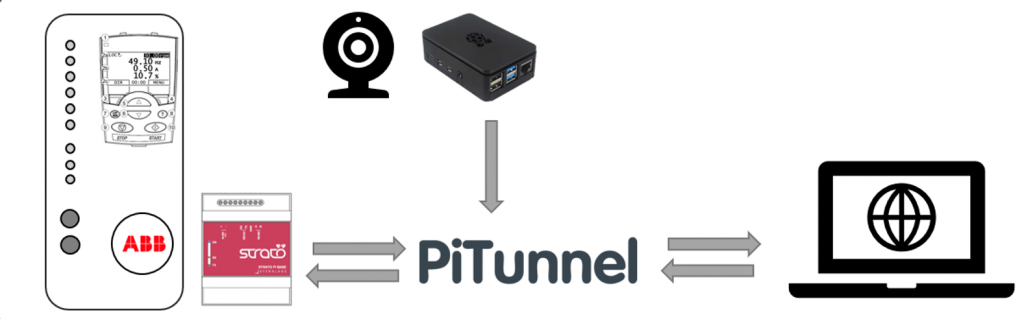
Rys. 1 Struktura systemu
[1] “3GVA052002-CSA | ABB.” https://new.abb.com/products/3GVA052002-CSA/3gva052002-csa (accessed Jan. 04, 2023).
[2] “ACS850 Firmware Manual ACS850 Standard Control Program.”
[3] “Strato Pi – The Industrial Raspberry Pi – Sfera Labs.” https://www.sferalabs.cc/strato-pi/ (accessed Jan. 04, 2023).